 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAortic root landmark localization with optimal transport loss for heatmap regression
Jul 06, 2024Anatomical landmark localization is gaining attention to ease the burden on physicians. Focusing on aortic root landmark localization, the three hinge points of the aortic valve can reduce the burden by automatically determining the valve size required for transcatheter aortic valve implantation surgery. Existing methods for landmark prediction of the aortic root mainly use time-consuming two-step estimation methods. We propose a highly accurate one-step landmark localization method from even coarse images. The proposed method uses an optimal transport loss to break the trade-off between prediction precision and learning stability in conventional heatmap regression methods. We apply the proposed method to the 3D CT image dataset collected at Sendai Kousei Hospital and show that it significantly improves the estimation error over existing methods and other loss functions. Our code is available on GitHub.
The Application of Zig-Zag Sampler in Sequential Markov Chain Monte Carlo
Nov 18, 2021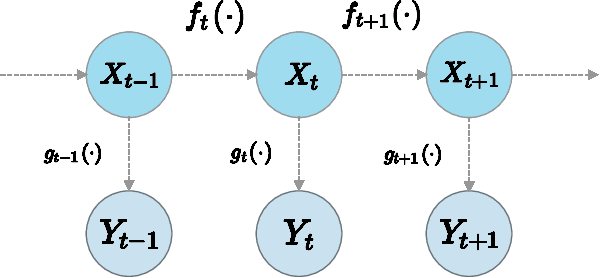
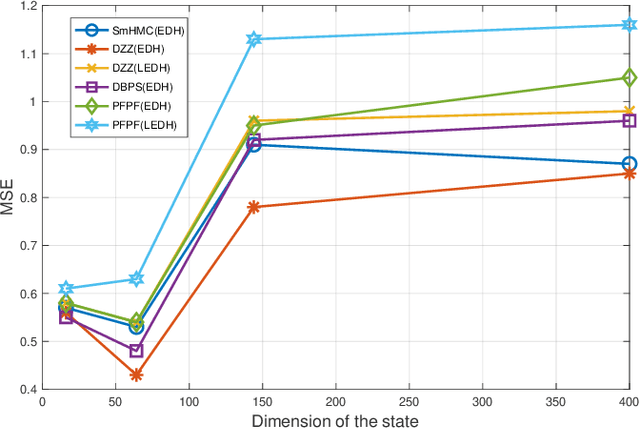
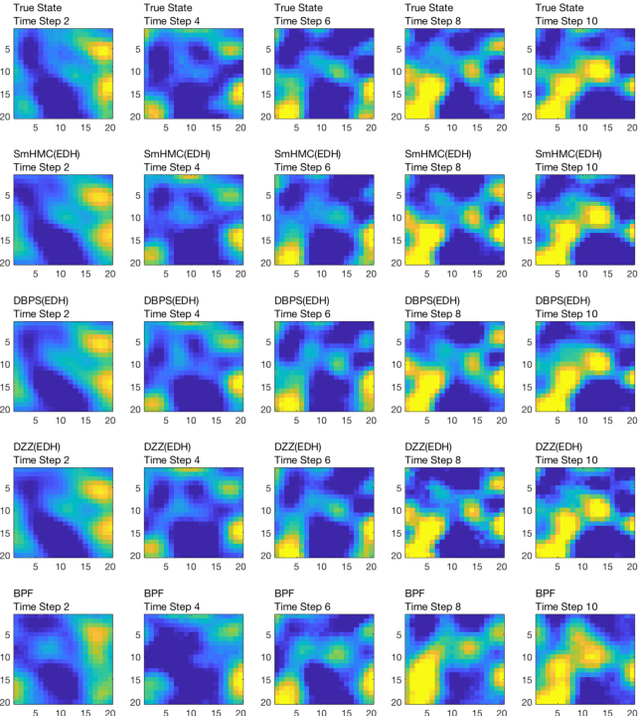
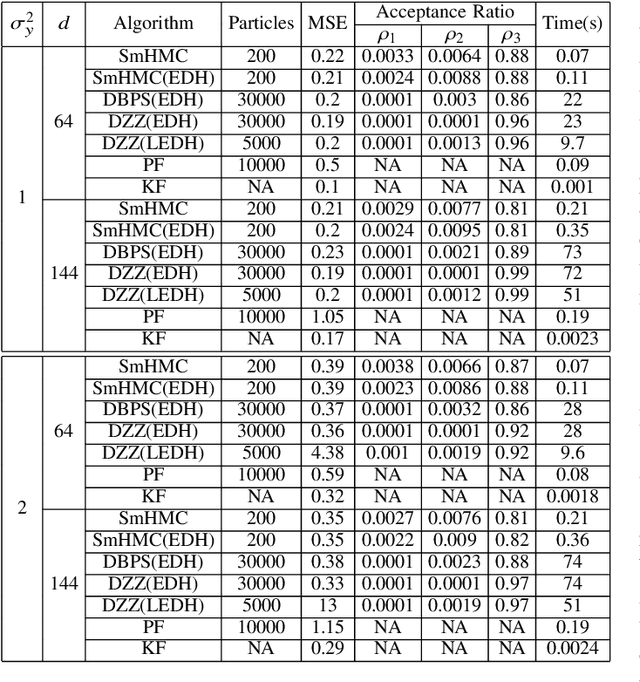
Particle filtering methods are widely applied in sequential state estimation within nonlinear non-Gaussian state space model. However, the traditional particle filtering methods suffer the weight degeneracy in the high-dimensional state space model. Currently, there are many methods to improve the performance of particle filtering in high-dimensional state space model. Among these, the more advanced method is to construct the Sequential Makov chian Monte Carlo (SMCMC) framework by implementing the Composite Metropolis-Hasting (MH) Kernel. In this paper, we proposed to discrete the Zig-Zag Sampler and apply the Zig-Zag Sampler in the refinement stage of the Composite MH Kernel within the SMCMC framework which is implemented the invertible particle flow in the joint draw stage. We evaluate the performance of proposed method through numerical experiments of the challenging complex high-dimensional filtering examples. Nemurical experiments show that in high-dimensional state estimation examples, the proposed method improves estimation accuracy and increases the acceptance ratio compared with state-of-the-art filtering methods.
Ensemble Kalman Variational Objectives: Nonlinear Latent Trajectory Inference with A Hybrid of Variational Inference and Ensemble Kalman Filter
Oct 17, 2020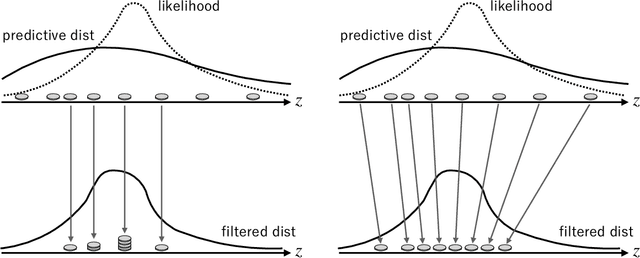
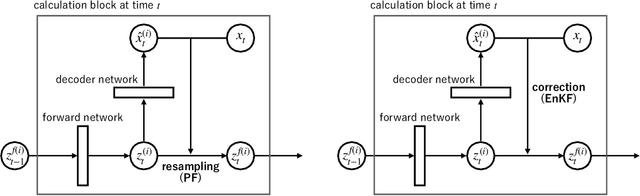
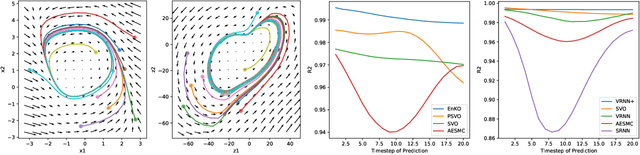
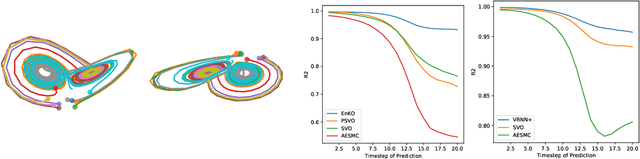
Variational Inference (VI) combined with Bayesian nonlinear filtering produces the state-of-the-art results for latent trajectory inference. A body of recent works focused on Sequential Monte Carlo (SMC) and its expansion, e.g., Forward Filtering Backward Simulation (FFBSi). These studies achieved a great success, however, remain a serious problem for particle degeneracy. In this paper, we propose Ensemble Kalman Objectives (EnKOs), the hybrid method of VI and Ensemble Kalman Filter (EnKF), to infer the State Space Models (SSMs). Unlike the SMC based methods, the our proposed method can identify the latent dynamics given fewer particles because of its rich particle diversity. We demonstrate that EnKOs outperform the SMC based methods in terms of predictive ability for three benchmark nonlinear dynamics systems tasks.
Real-time Linear Operator Construction and State Estimation with The Kalman Filter
Feb 15, 2020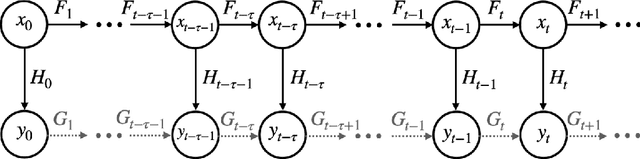
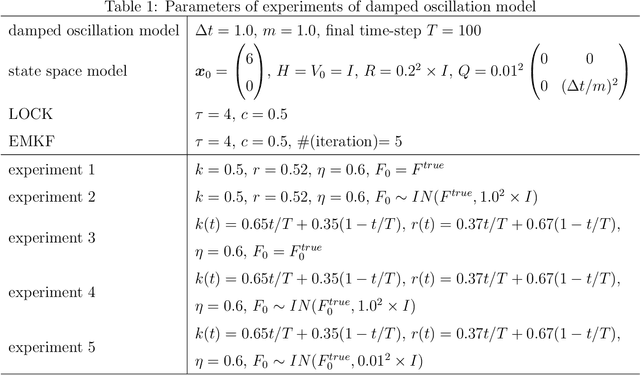
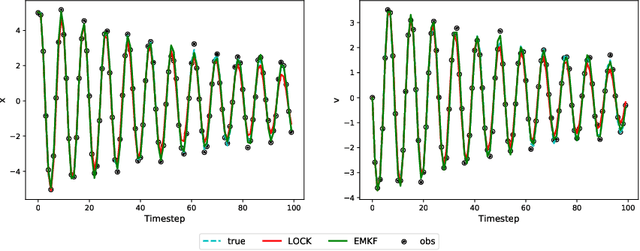
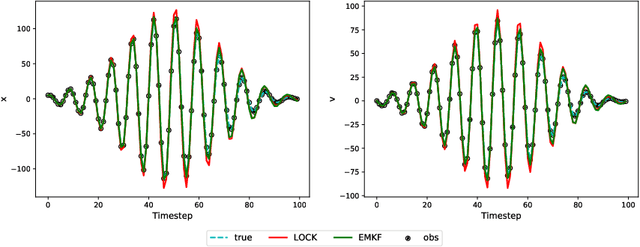
The Kalman filter is the most powerful tool for estimation of the states of a linear Gaussian system. In addition, using this method, an expectation maximization algorithm can be used to estimate the parameters of the model. However, this algorithm cannot function in real time. Thus, we propose a new method that can be used to estimate the transition matrices and the states of the system in real time. The proposed method uses three ideas: estimation in an observation space, a time-invariant interval, and an online learning framework. Applied to damped oscillation model, we have obtained extraordinary performance to estimate the matrices. In addition, by introducing localization and spatial uniformity to the proposed method, we have demonstrated that noise can be reduced in high-dimensional spatio-temporal data. Moreover, the proposed method has potential for use in areas such as weather forecasting and vector field analysis.